Robot Configuration
The trajectory optimizer depends upon the following user-specified parameters, which are entered in the Robot Configuration panel. The more accurately you enter these parameters, the more confident you can be that your robot will follow the time-optimized trajectory on the first attempt.
Tip
While more precision is always better, you'll most likely get diminishing returns after 3-4 significant figures.
Saving Robot Config
Saving a copy of the robot config somewhere safe, like the root of a robot project, is highly recommended. This is so you can correlate that robot project to your robot's specifications, and thus your paths.
Undo + Redo
Undo and Redo shortcuts work for all of these values.
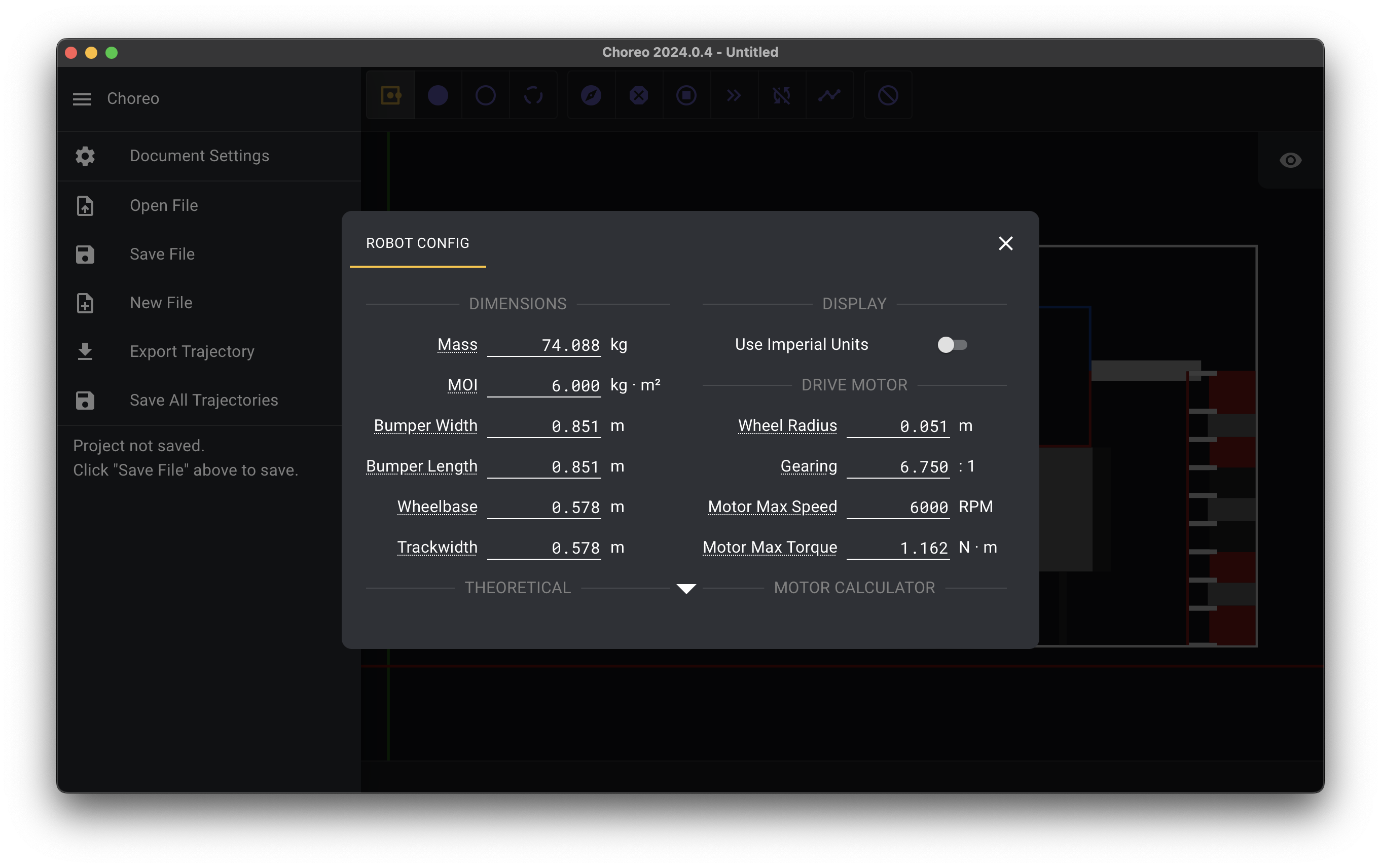
Dimensions
In this panel, enter some basic properties of your robot chassis.
- Mass \([kg]\): The mass of the robot with battery and bumpers
- MoI \([kg * m^2]\): The robot's moment of inertia, a measure of resistance to change in rotational velocity in response to a torque applied about the vertical axis
- Bumper Width and Bumper Length \([m]\): The overall size of the robot's bumper.
- Wheelbase and Trackwidth \([m]\): The largest distances between the robot's wheel centers
Drive Motor
This panel asks for details about the drive motors used to propel the robot around the playing field.
Geometric properties
- Wheel Radius \([m]\): The radius of the drive wheel
- Gearing (unitless): The ratio of \((\text{Drive motor rotations} / \text{Wheel rotations})\)
Motor performance properties
These values can be pre-filled using the Motor Calculator panel:
- Motor Max Speed \([\text{RPM}]\): The maximum speed of each drive motor
Choosing a Motor Max Speed
A reasonable choice of Motor Max Speed is ~80% of the free speed of the drive motor(s). Although your motors have more speed available, this headroom helps ensure that your robot is able to close any errors and return to the planned trajectory. Use the Motor Calculator to help select an appropriate value.
- Motor Max Torque \([N * m]\): The maximum torque applied by each drive motor
Choosing a Max Torque
A reasonable choice of Max Torque is that corresponding to a current draw of approximately 1.5 * BreakerValue experienced at the drive motor(s). Although your motors have more torque available, this headroom helps ensure that your robot is able to close any errors and return to the planned trajectory. Use the Motor Calculator to help select an appropriate value.
Theoretical
This panel displays calculated metrics about your robot, for reference and validation.
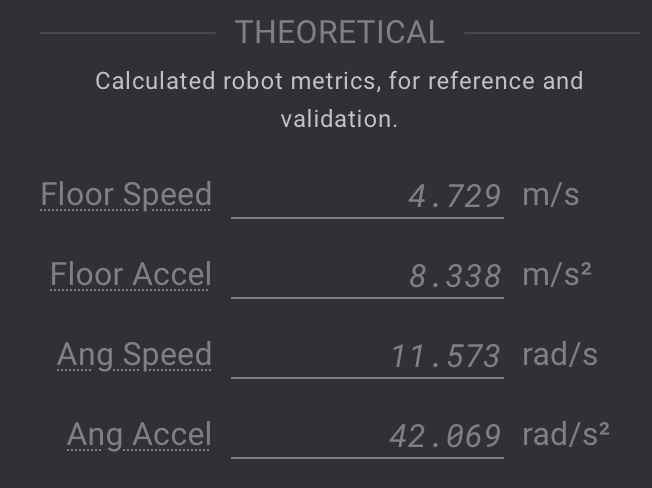
- Floor Speed \([m/s]\): The maximum speed reached by the robot when driving in a straight line and not rotating
- Floor Accel \([m/s^2]\): The maximum acceleration reached by the robot when driving in a straight line and not rotating
- Ang Speed \([rad/s]\): The robot's maximum angular speed when spinning in place
- Ang Accel \([rad/s^2]\): The robot's maximum angular acceleration when spinning in place
Motor Calculator
This panel helps you select appropriate drive motor parameters, using motor performance data from reca.lc/motors.
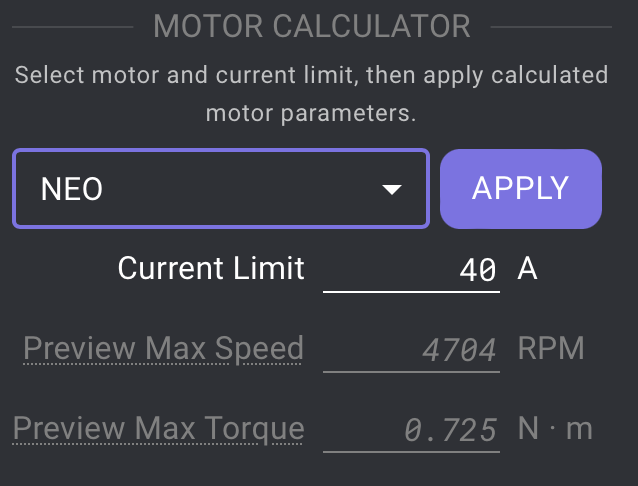
Choose a motor, then enter a current limit in Amps. The calculator displays the following preview values:
- Preview Max Speed \([\text{RPM}]\): Estimated speed under load (~80% of free speed)
- Preview Max Torque \([N * m]\): Motor torque at the given current limit
Pressing APPLY will apply these preview values to the Drive Motor panel above.
Warning
Make sure to press the APPLY button, or else your values will not save. Don't worry, you can always hit undo at any time to revert.
Supported motors
The following motors are supported by the calculator:
- Falcon 500
- Falcon 500 with FOC
- NEO
- NEO Vortex
- Kraken X60
- Kraken X60 with FOC
- CIM